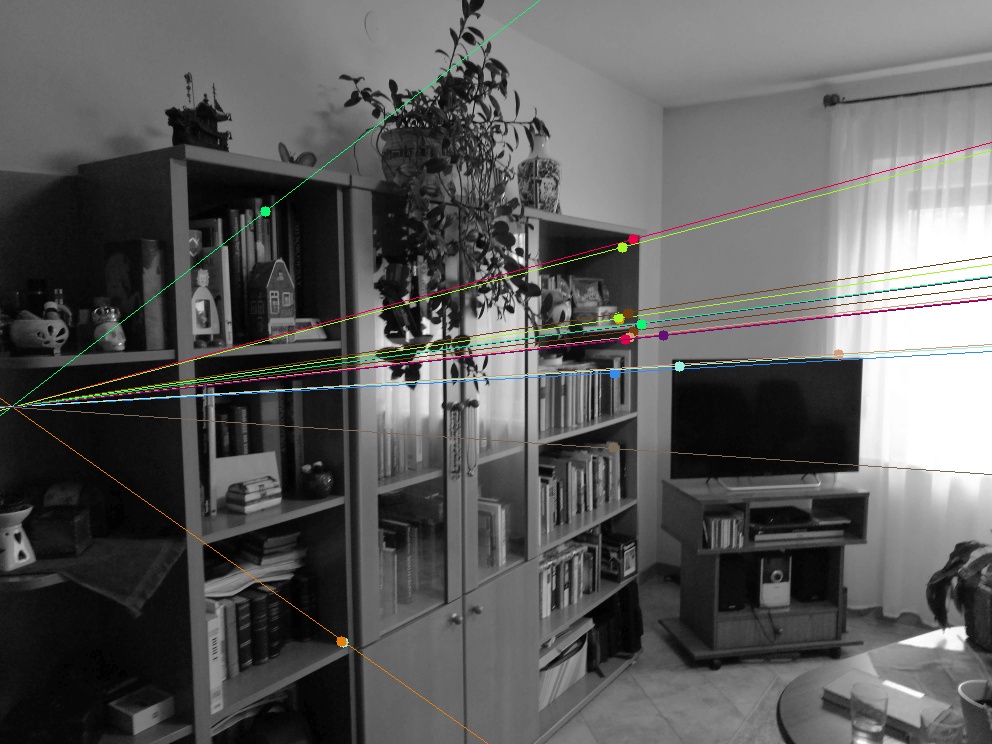
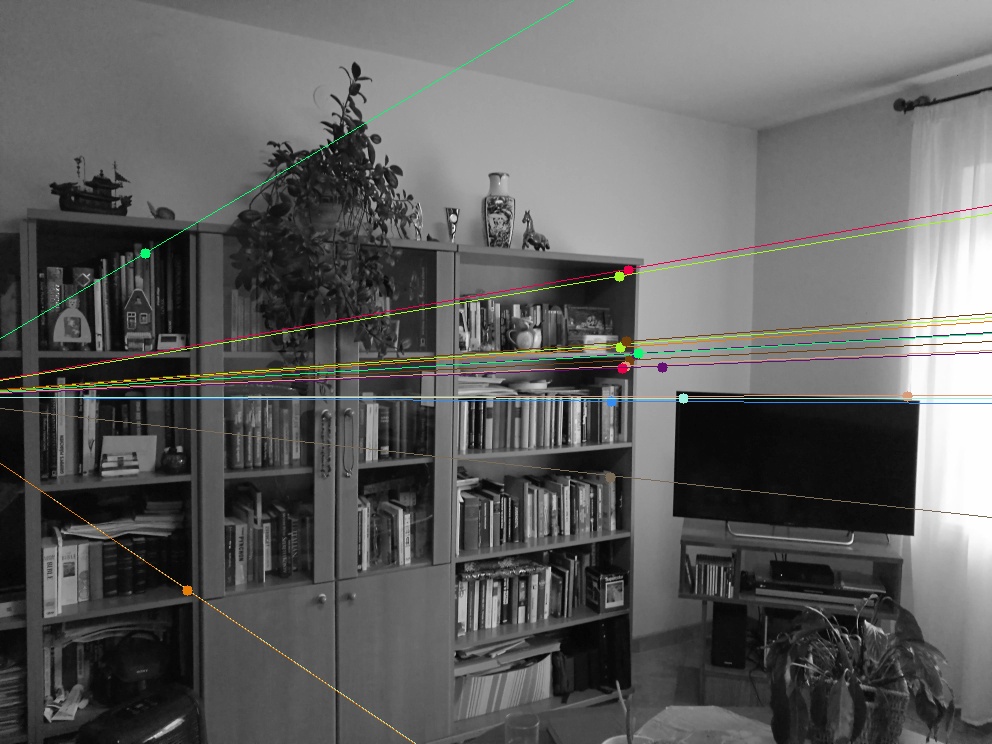
A fundamentális mátrix számításához a két képen potenciális AKAZE kulcspont-párokat keresünk a korábban megismert módon.
A korábbi síkhomográfiát feltételező RANSAC algoritmus helyett az epipoláris geometriai kényszert alkalmazzuk a pontpárok szűrésére. Az inlier pontok alapján megtörténik a fundamentális mátrix meghatározása is.
Meghatározzuk és kirajzoljuk a kulcspontokat és a párjukhoz tartozó epipoláris egyeneseket. Jól látható, hogy az ugyanazon színnel ábrázolt pontokon mennek át az egyenesek.
#
# Based on
# https://opencv-python-tutroals.readthedocs.io/en/latest/py_tutorials/py_calib3d/py_epipolar_geometry/py_epipolar_geometry.html
#
import cv2
import numpy as np
MIN_MATCH_COUNT: int = 10
img1Name = 'room_scene1.jpg'
img2Name = 'room_scene2.jpg'
def drawlines(img1, img2, lines, pts1, pts2):
''' img1 - image on which we draw the epilines for the points in img2
lines - corresponding epilines '''
r, c = img1.shape
img1 = cv2.cvtColor(img1, cv2.COLOR_GRAY2BGR)
img2 = cv2.cvtColor(img2, cv2.COLOR_GRAY2BGR)
cidx = 0
for r, pt1, pt2 in zip(lines, pts1, pts2):
# color = tuple(np.random.randint(0, 255, 3).tolist())
color = colors[cidx % 10]
cidx = cidx + 1
x0, y0 = map(int, [0, -r[2]/r[1]])
x1, y1 = map(int, [c, -(r[2]+r[0]*c)/r[1]])
img1 = cv2.line(img1, (x0, y0), (x1, y1), color, 1)
img1 = cv2.circle(img1, tuple(pt1), 5, color, -1)
img2 = cv2.circle(img2, tuple(pt2), 5, color, -1)
return img1, img2
np.random.seed(10)
colors = []
for i in range(0, 10):
colors.append(tuple(np.random.randint(0, 255, 3).tolist()))
img1 = cv2.imread(img1Name, 0) # baseImage
img2 = cv2.imread(img2Name, 0) # queryImage
img2_gr_bgr = cv2.merge((img2, img2, img2))
# Initiate detector
kpextract = cv2.AKAZE_create()
# kpextract = cv2.ORB_create()
# Find the keypoints and descriptors
kp1, des1 = kpextract.detectAndCompute(img1, None)
kp2, des2 = kpextract.detectAndCompute(img2, None)
print('Keypoints in img1:', len(kp1))
print('Keypoints in img2:', len(kp2))
img1kp1 = cv2.drawKeypoints(img1, kp1, None, (255, 0, 0), 4)
img2kp2 = cv2.drawKeypoints(img2, kp2, None, (255, 0, 0), 4)
# Matching based on descriptor similarity
# HAMMING should be used for binary descriptors (ORB, AKAZE, ...)
# NORM_L2 (Euclidean distance) can be used for non-binary descriptors (SIFT, SURF, ...)
matcher = cv2.BFMatcher(cv2.NORM_HAMMING)
matches = matcher.knnMatch(des1, des2, 2)
# Number of matches will be the number of keypoints in img1
print('Matches found: ', len(matches))
# Store all the good matches using Lowe's ratio test.
good_match = []
match_ratio = 0.7
pts1 = []
pts2 = []
for m, n in matches:
if m.distance < match_ratio * n.distance:
good_match.append(m)
pts2.append(kp2[m.trainIdx].pt)
pts1.append(kp1[m.queryIdx].pt)
print("Potential good matches found:", len(good_match))
# Computing correspondences
if len(good_match) < MIN_MATCH_COUNT:
print("Not enough matches are found - %d/%d" % (len(good_match), MIN_MATCH_COUNT))
exit(1)
pts1 = np.int32(pts1)
pts2 = np.int32(pts2)
F, mask = cv2.findFundamentalMat(pts1, pts2, cv2.FM_LMEDS)
print(F)
print(np.linalg.matrix_rank(F))
# We select only inlier points
pts1 = pts1[mask.ravel() == 1]
pts2 = pts2[mask.ravel() == 1]
print('Used number of point pairs:', len(pts1))
# Find epilines corresponding to points in right image (second image) and
# drawing its lines on left image
lines1 = cv2.computeCorrespondEpilines(pts2.reshape(-1, 1, 2), 2, F)
lines1 = lines1.reshape(-1, 3)
img5, img6 = drawlines(img1, img2, lines1, pts1, pts2)
# Find epilines corresponding to points in left image (first image) and
# drawing its lines on right image
lines2 = cv2.computeCorrespondEpilines(pts1.reshape(-1, 1, 2), 1, F)
lines2 = lines2.reshape(-1, 3)
img3, img4 = drawlines(img2, img1, lines2, pts2, pts1)
cv2.imshow('ep1', img5)
cv2.imshow('ep2', img3)
cv2.waitKey(0)
cv2.destroyAllWindows()