Jellemzői
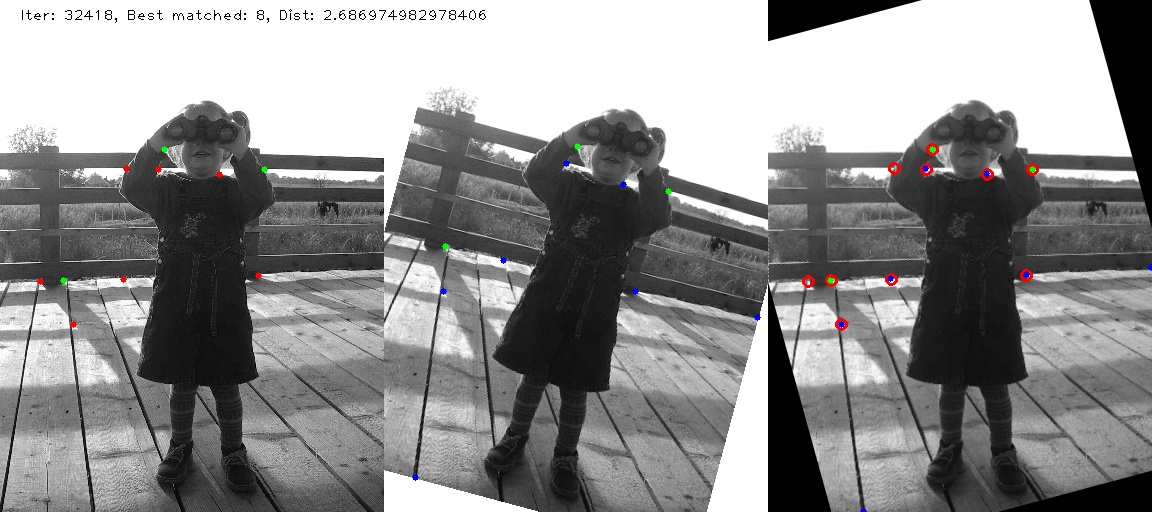
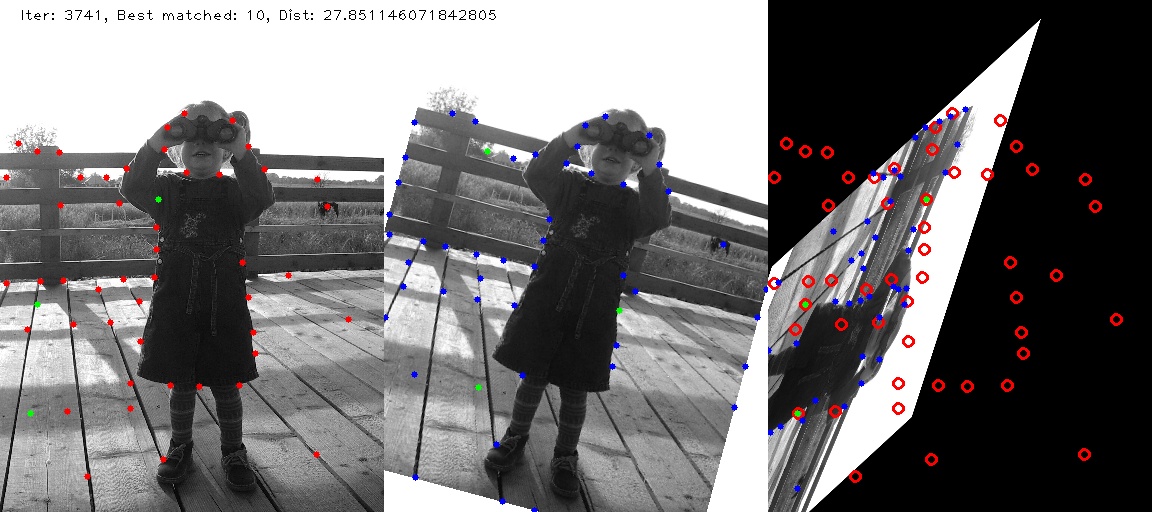
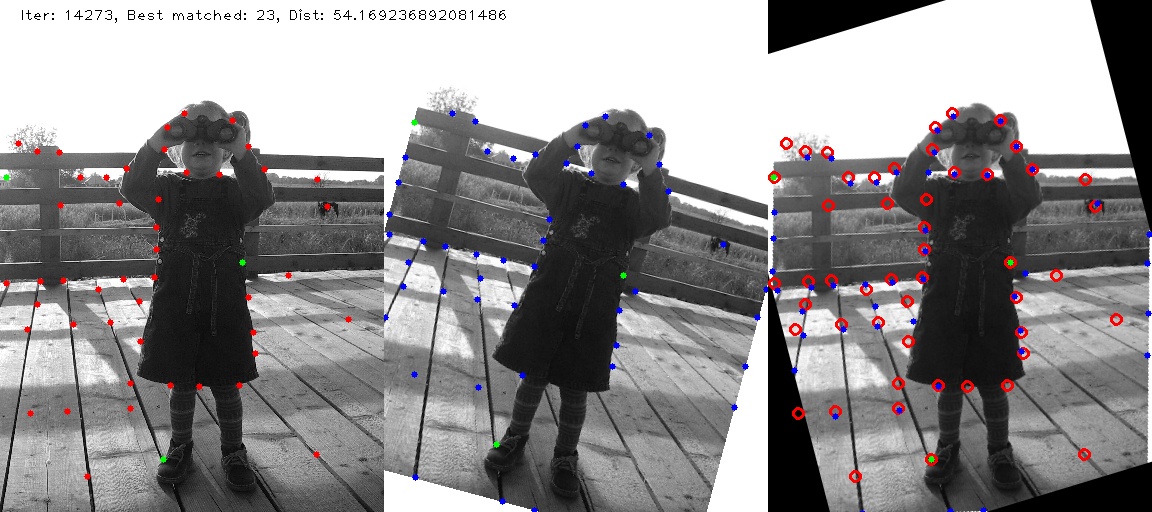
Az eddigi pontdetektorok csak koordináta információt szolgáltatnak. Ez alapján úgy végezhető el a párosítás, ha van egy modellünk, amely a ponthalmazok között hat. Fel kell készülnünk arra, hogy nem lesz minden pontnak párja a másik halmazban. Ezek az outlierek. A halmazokból kiválasztunk annyi pontot, amennyi az úgynevezett minimális megoldáshoz elegendő. A maradék pontokat használjuk a modell ellenőrzésére. Az a pont fogja a modellt támogatni, amely a modell geometriai transzformációja után közelébe kerül egy másik halmazbeli pontnak. Olyan modellt keresünk, amelyet a legtöbb pont támogat, a legkisebb távolság hibával.
Pontpárosításra többféle lehetőségünk is van. Ezek részletei az előadás anyagában bemutatásra kerültek.
Kis számú ponthalmazok (~10 pont) esetén megoldható az összes párosítás szisztematikus vizsgálata. Viszont az exponenciális időigény miatt már 15-20 pont esetén sem hatékony. Ekkor célszerű véletlenszerűen választott mintákkal dolgozni, például a RANSAC algoritmussal.
A tapasztalat az, hogy önmagában a pont koordináták kevés információt szolgáltatanak, a gyakorlatban szokásos százas-ezres nagyságrendű ponthalmazok párosításához a pontok környezetének hasonlóságát is célszerű figyelembe venni előszűrésként. Ezzel a lehetőséggel a következő részben foglalkozunk.