A program kerete a korábbiakhoz nagyon hasonlít, így most csak a kernellel foglalkozunk.
A közzös memória definiálása a kód elején van __shared__ előtaggal. Az így megadott változókat a fordító közösként kezeli, és a szálak közsen használhatják.
__shared__ float shared[BLOCKDIM][BLOCKDIM];
Ebben az esetében pont akkora közös memóriát használtunk, amekkora a blokk.
A következő lépés a közös memória kinullázása. Mivel annyi szál van ahány elem a meóriában ezt megtehetjük párhuzamosan úgy, hogy minden szál egy-egy memória elemet nulláz ki.
shared[threadIdx.x][threadIdx.y] = 0;
__syncthreads();
A nullázást egy szinkronizáció követi, hogy a további számítás előtt minden elem 0-s értékre álljon be.
Ezek után következhet a számítás. Ebbe a kódban egy szinuszos fehér foltot rajzounk minden 32x32-es négyzetbe, de bármi mást is rajzolhatnánk.
shared[threadIdx.x][threadIdx.y] = 255 * sinf(threadIdx.x * PI / blockDim.x) * sinf(threadIdx.y * PI / blockDim.y);
A kódnak ezena pontján kellene szinkronizálni. A programban szerepel is a megfelelő függvényhívás, de azt kikommenteztük.
Végül pedig az eredmények kiírása következik a globális memóriába.
result[tid + 1] = shared[threadIdx.y][threadIdx.x];
result[tid + 0] = shared[threadIdx.y][threadIdx.x];
result[tid + 2] = shared[threadIdx.y][threadIdx.x];
result[tid + 3] = 255;
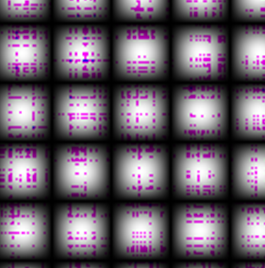
Itt észre kell venni, hogy minden szál egy másik szál áltel beírt értéket olvas a közös memóriából. Ezért a szinkronizáció hiányában lehet olyan szál, ami az eredeti 0-s értéket olvassa, és lesz olyan, ami az új számítás eredményét. A kimenet pedig a lenti képen látható mintázat.
A programot ki lehet próbálni úgy is, hogy visszatesszük a megfelelő helyen kikommentezett szinkronizációt.
A program érdekes pontja még, hogy a kiírásban nem volt ellenőrzés, hogy a kimeneti képen létezik-e az elérni kívánt képont. Ahogy korábban is itt is lehet, hogy nagyobb a blokstruktúra mint maga a kép, és vannak túllógó szálak. Ezeket viszont a kernel elején kezeltük. A túllógó szálak visszatértek, így a futásuk leállt.