Elméleti áttekintés
Előismeret
Az epipoláris geometria a fényképek alapján történő térbeli rekonstrukció és távolságmérés matematikai eszköze. Az epipoláris geometria sztereó képpárok közötti kapocslatot ír le.
Tekintsünk egy  térbeli pontot és két képsíkot, a bal és a jobb kamera képsíkjait. Az
térbeli pontot és két képsíkot, a bal és a jobb kamera képsíkjait. Az  pont képe a bal kamera képsíkján
pont képe a bal kamera képsíkján  , a jobb kamera képsíkján
, a jobb kamera képsíkján  . Jelölje bal és a jobb kamera középpontját rendre
. Jelölje bal és a jobb kamera középpontját rendre  és
és  .
.
A kamera középpontokat összekötő egyenes a bázisegyenes (angolul baseline). Az térbeli pont és a két kamera középpont által meghatározott sík az epipoláris sík. A képsíkok és az epilpoláris sík metszetei az epipoláris egyenesek. Az alábbi ábrán látható ezek ábrázolása.
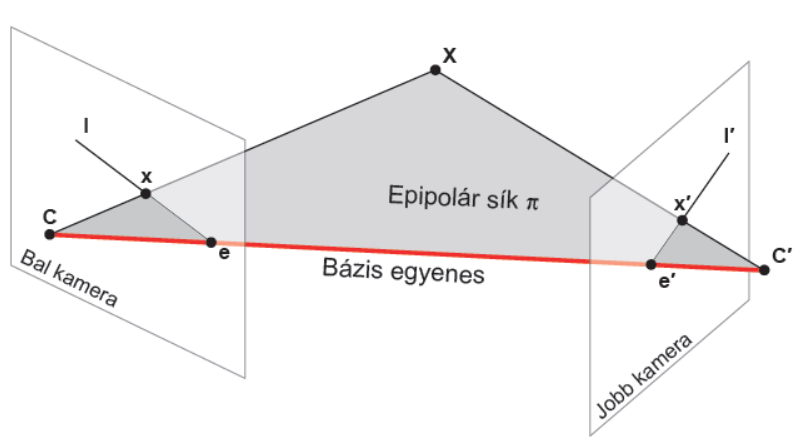
A célunk az, hogy kapcsolatot keressünk a két kamera képe között. A bal kamera középpontját és az térbeli pontot összekötő vetítősugár képe a jobb kamera síkjában az  egyenesként látszik, amelyet epipoláris egyenesnek hívunk. Mindegyik vetítősugár képe a másik kamerában egy egyenesként látszódnak, és ezek az epipoláris egyenesek egy pontban, az epipolban metszik egymást (a fenti ábrán ezeket
egyenesként látszik, amelyet epipoláris egyenesnek hívunk. Mindegyik vetítősugár képe a másik kamerában egy egyenesként látszódnak, és ezek az epipoláris egyenesek egy pontban, az epipolban metszik egymást (a fenti ábrán ezeket  és
és  jelöli). Másrészről pedig az epipolok a bázisegyenes és képsíkok metszéspontjai is. Tehát bal kamera képsíkjának minden pontjázhoz a jobb kamera képsíkján egy epipoláris egyenes tartozik, amelyek egyetlen pontban, az epipolban metszik egymást. Ezt a kapcsolat az
jelöli). Másrészről pedig az epipolok a bázisegyenes és képsíkok metszéspontjai is. Tehát bal kamera képsíkjának minden pontjázhoz a jobb kamera képsíkján egy epipoláris egyenes tartozik, amelyek egyetlen pontban, az epipolban metszik egymást. Ezt a kapcsolat az  fundamentális mátrixszal írható le az alábbi módon:
fundamentális mátrixszal írható le az alábbi módon:

A fundamentális mátrix mérete 3×3, rangja 2. Az is igaz továbbá, hogy minden rajta van az egyenesen, ezért  vagyis
vagyis  . A fenti egyenlőségek minden
. A fenti egyenlőségek minden  pontpár esetén fennálnak, ezért egy pontpárra az kiszámolható az alábbi módon:
pontpár esetén fennálnak, ezért egy pontpárra az kiszámolható az alábbi módon:


Ha n pontpárunk van, akkor a következő egyenletrendszert kell megoldani:

Legalább 8 pontmegfeleltetés szükséges. Ha  rangja nagyobb mint 8, akkor túlhatározott egyenletrendszert kapunk, amelynél a legkisebb négyzetes hiba meghatározásával lehet megkapni a megoldást. kiszámításához a normalizált 8 pontos algoritmust használjuk (lásd előadásanyag).
rangja nagyobb mint 8, akkor túlhatározott egyenletrendszert kapunk, amelynél a legkisebb négyzetes hiba meghatározásával lehet megkapni a megoldást. kiszámításához a normalizált 8 pontos algoritmust használjuk (lásd előadásanyag).
Epipólusok meghatározása
Mivel az epipólus valamennyi epipoláris egyenesen rajta van, ezért

Az epipólusokat az fundamentális mátrix SVD felbontásával kapjuk

- az epipólus a
 nullla szinguláris értékének megfelelő oszlopvektora lesz
nullla szinguláris értékének megfelelő oszlopvektora lesz - az epipólus az
 nullla szinguláris értékének megfelelő oszlopvektora lesz
nullla szinguláris értékének megfelelő oszlopvektora lesz
Esszenciális mátrix
Amennyiben ismerjük a  kalibrációs mátrixot, akkor
kalibrációs mátrixot, akkor
- inverzével megszorozva a képpontokat normalizált koordinátákat kapunk:

- inverzével megszorozva a kamera mátrixot, normalizált kameramátrixot kapunk:

Tekintsünk egy normalizált kamera párt

A kamera párnak megfelelő fundamentális mátrixot esszenciális mátrixnak nevezzük: 
Továbbra is teljesül: 
Az  és között a kapcsolat:
és között a kapcsolat: 
Négy megoldás lehetséges, de csak egy lesz jó, ahol a két kamera egy irányba néz.
Előismeret
Rektifikáció
A képek rektifikációja az epipoláris geometrián alapszik. A rektifikáció során azt a transzformációt (vagy transzformációkat) keressük, amely a képsíkokat egy síkba transzformálja. A rektifikáció után a bal és jobb kamera képe egy síkba kerül, továbbá a két képen az egymásnak megfelelő pontok ugyanazon pixelsorba kerülnek. A rektifikáció során felhasználjuk a pontpárokat, valamint a fundamanetális mátrixot. Mivel a rektifikáció során az egymásnak megfelelő képpontok egy pixelsorra kerülnek, így gyakorlatilag az epipoláris egyenesek párhuzamosak lesznek mindkét képen.
Licensed under the Creative Commons Attribution Non-commercial Share Alike License 4.0