Eredmények
-
ellenõrzési pont
A fejlesztõi környezetet, az OpenCV és VTK könyvtárak összelinkelését megoldottuk. Készítettünk két egyszerû demóprogramot. Az egyik a feladatot oldja meg, a másik egy 3D-s objektumot forgat a fej jobbra-balra mozgatásával egyszerre a monitorra rögzített kamera segítségével.
A demó programokról készült videóink a következõ linkeken elérhetõk:
http://www.youtube.com/watch?v=KNiY-u6H7WM
http://www.youtube.com/watch?v=KNiY-u6H7WM -
ellenõrzési pont
Elkészítettük a [2] referenciában leírt módszer implementációját, azzal az egyetlen módosítással, hogy a mozgás utófeldolgozása nem Kálmán filterrel, hanem egyszerû átlagolással történik. Mivel véleményünk szerint e módszer bonyolultsága nem áll arányban a hatékonyságával, úgy döntöttünk hogy saját ötleteken alapuló módszert is implementálunk.
A két módszer futásidejének elemzését az alábbi ábrán mutatjuk be:
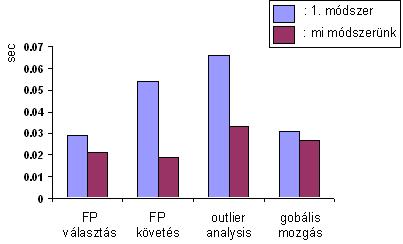
6. ábra: A két implementáció futásidejének elemzése.Az FP kiválasztás és követés az 1. módszerben mûveletigényesebb mint az OpenCV úgyanezt a feladatot ellátó függvényei. Az outlier analízisnél a bonyolultabb mátrixmûveletek lelassítják a RANSAC mûködését az 1. módszer esetén. Ennek oka az elmozdulás meghatározás hibájának továbbvitele kovarianciamátrixok formájában.
-
ellenõrzési pont
Megpróbáltuk a frame-ek közötti globális fényerõ változást frame-enkénti hisztogram kiegyenlítéssel kompenzálni, de mivel ez lokálisan nagy eltéréseket okozott az átlag pixelértékekben, az eredményeinket rontotta, ezért ezt az ötletet elvetettük.Megpróbáltuk a frame-ek közötti globális fényero változást frame-enkénti hisztogram kiegyenlítéssel kompenzálni, de mivel ez lokálisan nagy eltéréseket okozott az átlag pixelértékekben, az eredményeinket rontotta, ezért ezt az ötletet elvetettük.
A navigációs tesztképekkel bizonyítottuk hogy a mi módszerünkkel is el lehet érni a kívánt pontosságot, hiszen a feladatok hiba nélkül teljesíthetok. Célunk volt a számítások gyorsítása. A mátrixmuveletek futási idejét sikerült csökkentenünk az implementáció hatékonyabbá tételével, kevesebb szükségtelen memóriafoglalás használatával.
A használhatóságot javítottuk az utófeldolgozás közben végzett átlagolás súlyozásával.
Tesztelés közben megfigyeltük hogy a kamerától kapott kép mérete jelentosen befolyásolja a futás sebességét, ezért méréseket végeztünk az összefüggés felderítése céljából (6. ábra). Ezek alapján sikerült megtalálni a leghasználhatóbb felbontást a mi tesztelo hardverünkre (160x120).
