Elméleti háttér
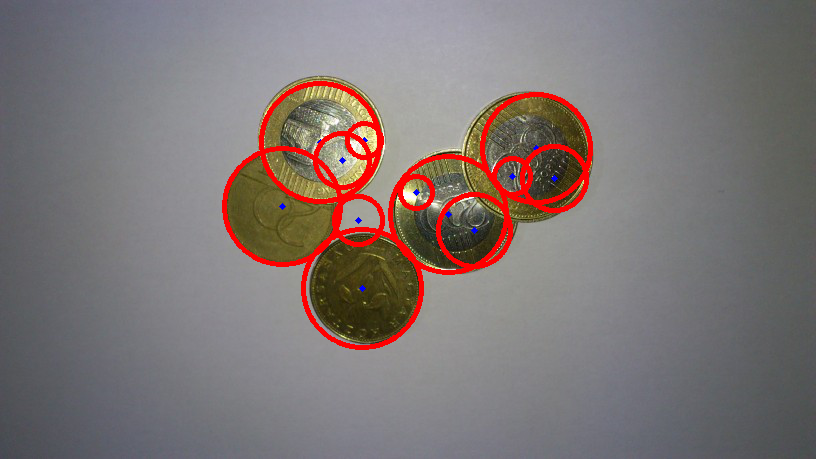
Az egyenes detekcióhoz hasonlóan Hough transzformációval körök detekciójára is lehetőség nyílik. Az ötlet itt is hasonló. Menjünk végig a bináris képen, és minden objektumpontra vizsgáljuk meg, hogy milyen középpontú és mekkora sugarú kör mehet rajta keresztül, amit egy összegzőtömbben tartunk nyilván. Az objektumpontok vizsgálata után az összegzőtömb lokális maximumértékei adják a detektált köröket.
A következőket vehetjük észre:
- Az összegzőtömb dimenziója itt 3 lesz, mert egy kört a középpontja és a sugara ír le.
- A nagymértékű memóriafoglalás elkerülése, és a hatékony működés elősegítésére csökkentsük az összegzőtömb méretét nagyobb léptékű paraméterválasztással. Érdemes a kör lehetséges sugaraira is egy elegendően szűk tartományt megadni.
- A módszer alkalmas körívek keresésére is, nem kell teljes kör legyen.
- Érdekesség, hogy az OpenCV implementációnak nem bináris élképet, hanem 8 bites szürkeárnyalatos képet kell átadnunk, az élkeresést beépítve végzi a Canny operátorral.